|
MOS Source Code
|
|
MOS Source Code
|
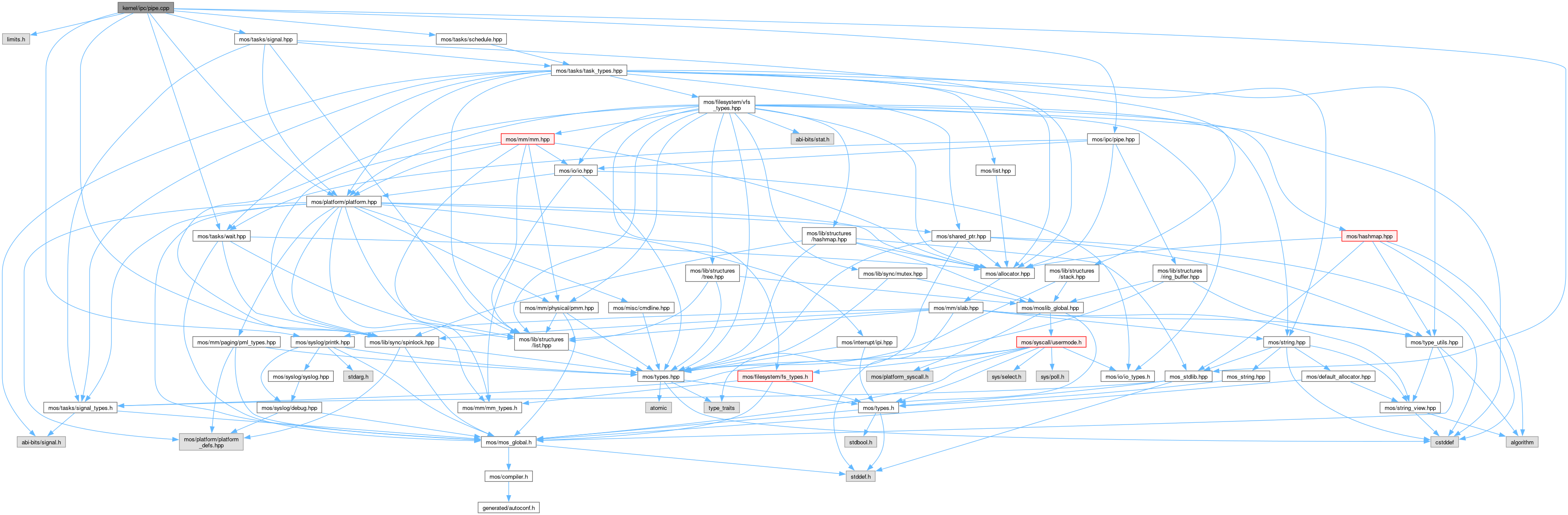
#include "mos/ipc/pipe.hpp"#include "mos/platform/platform.hpp"#include "mos/tasks/schedule.hpp"#include "mos/tasks/signal.hpp"#include "mos/tasks/wait.hpp"#include <climits>#include <mos/lib/sync/spinlock.hpp>#include <mos_stdlib.hpp>Go to the source code of this file.
Macros | |
| #define | PIPE_MAGIC MOS_FOURCC('P', 'I', 'P', 'E') |
| #define | advance_buffer(buffer, bytes) |
Functions | |
| size_t | pipe_write (pipe_t *p, const void *buf, size_t size) |
| size_t | pipe_read (pipe_t *p, void *buf, size_t size) |
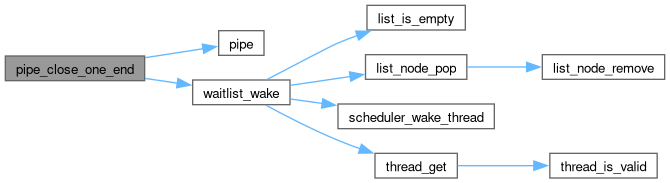
| bool | pipe_close_one_end (pipe_t *pipe) |
| Close one end of the pipe, so that the other end will get EOF. | |
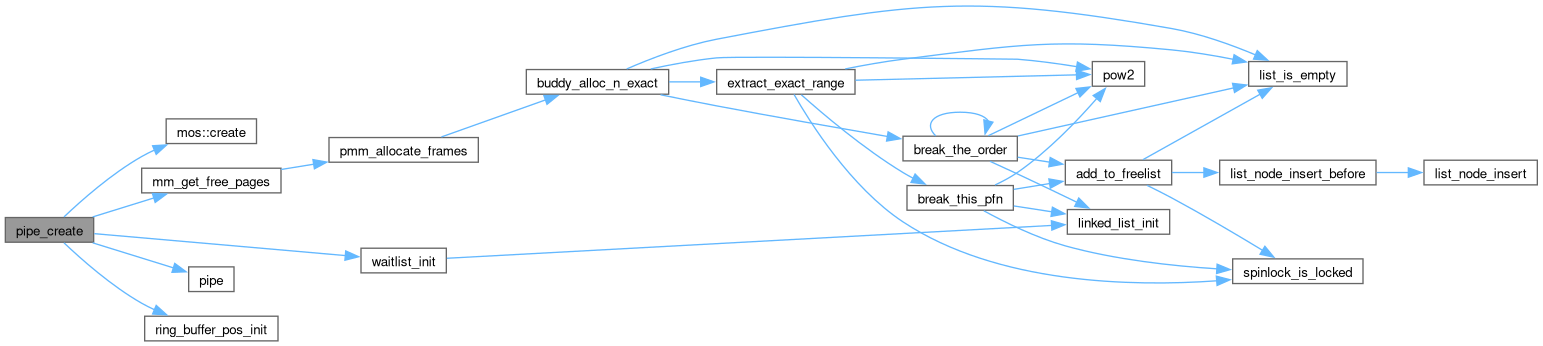
| PtrResult< pipe_t > | pipe_create (size_t bufsize) |
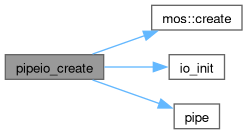
| pipeio_t * | pipeio_create (pipe_t *pipe) |
| #define PIPE_MAGIC MOS_FOURCC('P', 'I', 'P', 'E') |
Definition at line 16 of file pipe.cpp.
Referenced by pipe_close_one_end(), pipe_create(), pipe_read(), and pipe_write().
| #define advance_buffer | ( | buffer, | |
| bytes ) |
Definition at line 20 of file pipe.cpp.
Referenced by ipc_client_write(), ipc_server_write(), and PipeIOImpl::on_write().
Definition at line 80 of file pipe.cpp.
Referenced by ipc_client_read(), ipc_server_read(), and PipeIOImpl::on_read().
Close one end of the pipe, so that the other end will get EOF.
| pipe | The pipe to close one end of. |
Definition at line 134 of file pipe.cpp.
Referenced by ipc_client_close_channel(), ipc_server_close_channel(), and PipeIOImpl::on_closed().
Definition at line 165 of file pipe.cpp.
Referenced by ipc_server_accept(), and MOS_STATIC_ASSERT().
Definition at line 213 of file pipe.cpp.
Referenced by MOS_STATIC_ASSERT().